应激自动化
带有动力辅助系统的装置,如刹车和方向盘,是人和机器自然协作的基本例子。得益于现代电子科技的发展,人机之间发展出更多的合作。以“酷博特”[17] 或“协作机器人”(Cobot or Collaborative Robot)为例,它由埃德·科尔盖特(Ed Colgate)和迈克·佩什金(Michael Peshkin)两位教授在他们任教的西北大学智能机械系统研究室发明。酷博特是人机之间自然互动的另一个绝佳例子,类似于马与骑手的关系。当我要求佩什金教授讲讲酷博特时,他是这么说的:
最聪明的物件[18] 是那些能与人的智力互补的,而不是尝试超越人的。就像最聪明的老师一样。
酷博特的亮点在于人与机器之间共同控制、共享智慧。机器人专注于自身优势,操作者则发挥人类所长。
我们最先把协作机器人用于搬运货物、汽车组装和仓储业务方面。酷博特负责寻找存储空间,好让人能够迅速准确、不费力地把大件物品放妥。如果大件物品没有固定的存储空间,工作人员可以用他们的视力、灵巧的手脚和解决问题的技巧去移动那物品。如有必要,他们还可以把物品沿着一个导向平面往上推。
酷博特是一个精彩的人机共生的例子,由于使用者也参与其中,利用协作机器人,就像日常操作那样搬运和移动物体。唯一不同的是这些物件可能很重,但由于协作机器人的帮助,搬运和放置不需要操作者费太大力气。这个系统会放大力量:操作者只需要施加很小的、力所能及的力量即可,其他的工作由机器人来完成。操作者觉得好像自己在完全控制机器人,甚至不觉得背后有机器在帮忙。另外一个例子,将协作机器人技术应用在汽车生产线上,帮助工人安装汽车发动机。一般来说,要提起像汽车发动机这样的重物,必须要靠人工控制的高架提升机,或者可以自动完成工作的智能起重机。如果用协作机器人,工人只需要把绳子和钩子挂在发动机上,然后轻轻一提就行。发动机非常重,一个人根本提不起来,更不用说用一只手,但协作机器人能够感应到提升的力量,然后提供升举发动机所需要的力量。当工人要把发动机移位、旋转或是再放低一些,他们只需轻轻地提升、推移、旋转或往下拽拉;协作机器人能感应到这力量,然后把力量放大到足够完成任务的程度。结果就是完美的人机合作。工人们并不觉得他们使用了机器,而是以为自己在移动发动机。
酷博特还可以被设计得更加先进、成熟。例如,如果发动机不应该朝某些方向移动,或者不能沿着某些规定的路径搬运,协作机器人的控制系统可以设置虚拟的墙壁和路径,如此一来,操作者如果把机器人往墙壁的方向推,或者偏离规定路线,协作机器人就会拒绝执行,不过会以自然、客气的方式拒绝。事实上,工人可以利用这个人工假想墙作为帮手,比如先把发动机随便推到“墙边”,然后沿着这设定的墙移动机器。这种人工的范围设定操作起来感觉很自然,会让人以为好像真的有一道墙存在,使用者并不会感到机器在强迫你操作。因而你可以自然地避免越界,或者使用它作为指引,有意沿着“墙”移动机器,以保持直线路径。下面是酷博特的设计者对这种可能用途的说明。
令人兴奋的可能应用[19] 之一:用电脑程序设定一些限制。例如,用来作为限制移动的实体墙,可以有效地起到导向作用,极大地改进一些任务操作性能,如“遥控插配作业”(peginhole)。另一个例子是使用“魔术鼠标”(Magic Mouse),一种电脑界面操控设备,可以将操作者的手势导向有益的方向。例如,可以避免鼠标滑出下拉式菜单。第三个例子是机器人外科手术系统,是机器人帮助导引外科医生手中的手术器械。第四个例子是汽车装配生产线,即利用事先设定好的限制条件帮助工人将大型配件,如仪表板、备胎、座椅、车门等,无碰撞损伤地移动到目标位置。
协作机器人是动力辅助(powerassisted)系统大家族中的一员。还有一个例子是那种动力驱动的机械外骨骼(exoskeleton),这是一种可以穿在身上的外壳式的衣服或机械式的外骨架,就像酷博特一样,它能感测到人的动作,然后将动作的力量放大到所需的程度。机械外骨骼目前尚未实现,还停留在概念阶段。这一类未来机器人的拥护者认为,这类装置能用于建造房屋、扑灭火灾和其他危险环境的工作,让人可以提起重物,跳得更高更远。它们还有益于残疾人的物理治疗,让他们恢复正常的体力,同时还可以提供康复训练,最终增强病人的力量,顺利完成康复流程。与驾驭马匹的比喻用在汽车控制上非常类似,控制缰绳松紧变化的概念也能应用在这里,医用康复外骨骼也能够随着病人控制程度的变化而变化,即病人主导为“拉紧缰绳”,机器人主导为“放松缰绳”。
自然互动的另一例子是赛格威个人代步车(Segway Personal Transporter),这是一个两轮的个人运输系统。赛格威代步车聪明地设计出人机共生,它可以同时支持行为控制和人类的高级反应控制。人站在代步车上面,代步车就自动保持人和机器共同平衡。当你上身往前倾,代步车就往前移;往后倾,代步车就停下来。同样地,想转弯,稍将上身倾向于要转的方向就能实现。代步车比自行车好用,而且自然。然而,就像马并不适合所有人一样,赛格威代步车并不适合任何人,它要求使用者具有一定的技巧和注意力。
我们来对照一下比较自然的人机互动,如马与骑手、酷博特与工人,或者人与赛格威代步车;比较刻板的人机互动,如飞机上的驾驶员与自动驾驶系统,或者驾驶者与汽车的定速巡航系统。在后者的互动中,设计者假设操作者会慎重地设定控制条件,开启系统,然后由系统自动去运作——直到系统出了问题,这时,操作者就得立刻去解决影响了自动操作的问题。
本章节所提到的一些自然的、反应性的互动案例,说明了恰当应用机器智能和协作的优势,设计出真正的人机共生——这是人机互动的最佳境界。
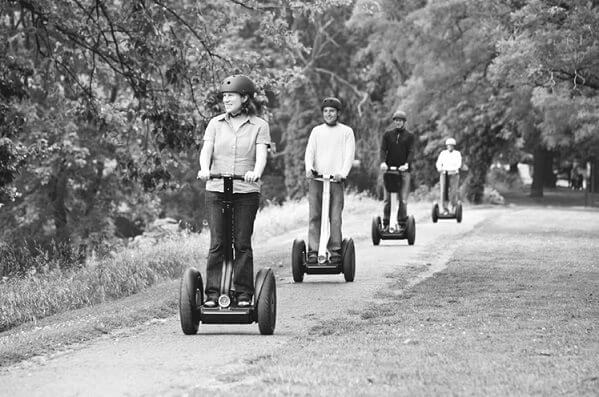
一种协作机器人,人站在上面用身体的倾斜方向控制车子的移动方向,人与代步车轻松自然地形成一个共生体。(赛格威公司授权图片)
[1] “而当吸尘器的软管被物体堵塞……”逮到你了。你来这里是否因为你认为吸尘器内有障碍物时声音频率会降低?不是的,它会提高。并不是因为马达要更用力,而是因为软管阻塞时,管内没有空气通过,就没有空气阻力,马达就能转得更快。不相信的话,你可以自己试试看。
[2] “将行为上的‘内隐沟通’定义为……”(以及下面引用的文字)[卡斯托佛朗奇(Castlefranchi),2006]。
[3] “维尔·黑尔(Will Hill)、吉姆·赫兰(Jim Hollan)、戴夫·罗布鲁斯基(Dave Wroblewski)和提姆·麦肯莱斯(Tim McCandless)”[黑尔(Hill)等,1992]。
[4] “很重要的一本书《符号学工程》……”[克莱丽萨·苏萨(Clarisse de Souza),2005]。
[5] “‘示能’一词……”[吉普森(Gibson),1979]。
[6] “实验室里的一个研究项目。正在被美国太空总署和德国布蓝兹维的运输系统中心……”[佛雷米西(Flemisch)等,2003]。
[7] “策略脚可以让人工操作者与系统灵活互动……”[米勒(Miller)等,2005]。请注意:在这里用的“Playbook”这个字是智能信息技术公司(Smart Information Flow Technologies)位于明尼阿波利斯(Minneapolis),明尼苏达州(Minnesota)的注册商标。
[8] “一个打算在图森机场降落但差点出事的驾驶员……”[利维(Levin),2006]。这个驾驶员的保密报告是来自美国太空总署的飞行安全自愿报告系统(Aviation Safety Reporting System,请参考asrs.arc.nasa.gov/overview..htm)。
[9] “让驾驶看起来更危险,反而可以使开车更安全。”[汉密尔顿-贝利和琼斯(Hamilton-Baillie&Jones),2005;麦克尼科尔(McNichol),2004]。
[10] “‘风险稳态’是研究安全的文献里用于这种现象的科学用语。……自从这个论点在20世纪80年代由荷兰的心理学家威尔德提出后,引起了正反争论。”[威尔德(Wilde),1982]。
[11] “这就是荷兰交通工程师汉斯.蒙德门……”[艾略特,麦科尔和肯尼迪(Elliott,McColl,& Kennedy),2003;汉密尔顿-贝利和琼斯(Hamilton-Baillie&Jones),2005;麦克尼科尔(McNichol),2004]。
[12] “赞成这个主张的人把这方法称为‘共享空间’。”(请参考www.shared-space.org)。“共享空间”也是欧盟经由北海区域间合作计划(InterregNorth Sea Program)赞助的一个国际性研究项目的名称。
[13] “共享空间。这是公共空间设计的一个新方法……”(引自共享空间网站:www.shared-space.org)。
[14] “特别是英国的研究员爱里奥(Elliott)、马可(McColl)和肯尼迪(Kennedy)……”[艾略特(Elliott)等,2003],这段引言来自肯尼迪(Kennedy),2006。
[15] “居家生活中,跌倒和中毒是意外受伤和死亡的最大原因。”(出自国家伤害预防与控制中心,2002)。
[16] “其危险性和酒驾一样。”[斯特雷耶,德鲁斯和克劳奇(Strayer,Drews&Crouch),2006]。
[17] “以‘酷博特’或‘协作机器人’(Cobot or Collaborative Robot)为例……”(科尔盖特,沃纳苏福-普瑞斯和佩什金(Colgate,Wannasupho-prasit,&Peshkin),1996]。
[18] “最聪明的物件是那些能与人的智力互补的……”[2001年12月21日迈克·佩什金(Michael Peshkin)寄的电子邮件,已稍加修改]。
[19] “令人兴奋的可能应用之一是……”[科尔盖特(Colgate)等,1996]。这里删去学术用语使文章比较易读。原文里提到罗森伯格(Rosenberg,1994)和凯利&斯科蒂(Kelley&Salcudean,1994)分别在“虚拟实体墙”和“魔术鼠标”方面的贡献。




本书评论