第3章 骨骼系统
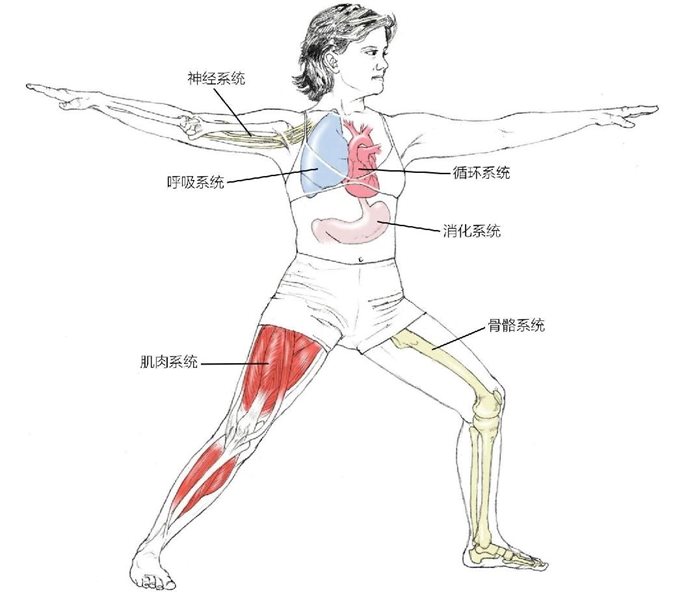
身体的每一个系统都会参与我们做的每一个动作。如果没有神经、循环、内分泌、呼吸、消化、免疫、结缔组织、体液、骨骼、韧带和肌肉等系统(仅举几例)的积极参与,我们就无法实现呼吸动作,或将双臂举过头顶并向前屈体成站立前屈式(uttanasana),更不用说将身体摆成倒立姿势。
身体各系统的动态平衡
我们所关注的任何身体部分都是多个系统的组成部分:虽然骨头一般被认为是骨骼系统的一部分,但它们也在其他系统中发挥着重要作用,如循环、神经、免疫和内分泌等系统。骨头属于循环系统和免疫系统的一部分,因为红血球和白血球都是在骨髓中产生的。它们是神经系统的一部分,因为钙对于神经细胞的工作具有一定的作用,它们也是内分泌系统的一部分,因为骨细胞所分泌的激素在我们的代谢中具有一定的作用。所有这些系统都不能单独工作。如果没有循环系统,呼吸、内分泌和消化等其他系统就不能够将氧、激素和营养物输送给身体的细胞。如果没有神经系统,将不可能协调四肢的肌肉,也无法调节血管的扩张来将足够的血液供给骨骼、大脑、心脏或肌肉。身体的所有系统都彼此重叠和相互依存(第46页,图3.1)。
如果我们在学习解剖学和瑜伽时只关注一两个系统,我们所面临的风险就是过度简单化瑜伽体式练习对身体中各个系统所产生的令人难以置信的效果。另一方面,我们可以深入探究一个重点,并发现让我们的整体体验更丰富的惊人复杂性。基于本书的目的,重点是骨骼和肌肉系统在产生动作和创造体式中所起的作用,要明白在任意起点开始都可以带领我们进入与人体中所有其他系统和组织的关系。
肌肉骨骼系统
骨头、韧带、肌肉和肌腱都交织在一起,形成一个动态的整体。肌肉骨骼系统的骨架部分包括骨头、韧带,以及构成关节的其他组:滑液、透明软骨、纤维软骨盘和楔骨。肌肉部分包括跨关节间隙并附着在骨骼上的肌肉和肌腱,以及神经末梢组织,它们可以控制肌肉动作的精准顺序和节奏。所有这些组织要么由多层结缔组织构成,要么被包裹在其中。

骨骼系统和肌肉系统常常被当作两个独立的系统。当我们考虑如何产生运动的时候,将它们视为一个肌肉骨骼(或骨骼肌肉)系统会更合理。肌肉和骨骼紧密合作,处理我们与重力和空间的关系,为我们提供直立的姿势,并帮助我们在世界中移动,自己进食,使用工具,并创造变化。
如果没有骨骼系统的结构和支持,肌肉会成为一滩收缩组织,没有可供移动的东西。另一方面,如果没有肌肉所产生的运动,骨头将无法在空间中移动,并且只能对来自身体外部的穿过它们的力量作出响应。如果没有结缔组织(如韧带和肌腱),骨头和肌肉就没有办法彼此连接。
骨头其中一项任务就是接收重量和传递作用力,而韧带则引导作用力沿着特定通路传递。这个重量和作用力可能由重力的吸引或其他来源产生,比如,肌肉带动腿在空间中移动,以迈出脚步。肌肉系统的任务是将骨头带到让它们可以尽可能高效地完成任务的位置。
骨骼系统组织:骨骼和韧带
我们的骨头是不可思议的结构。它们足够坚固,可以承受通过它们所传递的力量,不会断裂,并且它们足够轻,我们可以在空间中移动它们,它们也有足够的弹性,在三维空间中可以适应来自四面八方的压力。
韧带也发挥了惊人的作用。它们足够柔韧,可以在关节实现三维运动,并足够强健,可以跨关节的空间对准并引导巨大的力量在骨头之间传递。
骨骼系统中的运动发生在许多层面上。在细胞层面上,每个细胞都在不断分解和建立骨基质及韧带的纤维。在组织层面上,每块骨头和每条韧带都具有某种程度的形状改变能力,以响应穿过它的作用力。在系统层面上,运动发生在两块或多块骨头之间存在关系的位置:关节。
关节
在骨骼系统中,术语“关节”描述两块或多块骨头的表面形成关联且彼此接合的空间。关节更多的是一个事件,而不是一个位置,因为它的存在依赖于移动和改变。如果有任何移动发生,无论是多么微小的动作,都会存在一个关节。
通常,按连接两块骨头的组织对关节进行结构上的分类。这些组织可能是软骨、纤维组织、滑液,或三者的某种组合。也可以按所实现的移动程度在功能上对关节进行分类,还有按所涉及的骨头数量和关节的复杂性在生物力学上进行分类。
在瑜伽体式的分析中,我们观察到滑膜关节中的移动,这是人体内最灵活的关节。(其中一些滑膜关节至少有部分是软骨或纤维)。

滑膜关节
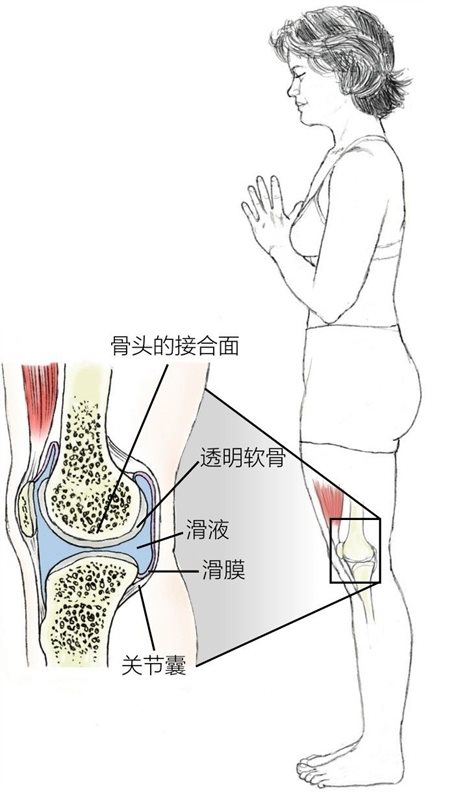
滑膜关节从中心开始向外移动,它包括彼此接合的骨头、骨头之间的滑液、产生滑液的膜,以及围绕并保护整个结构的结缔组织(图3.2)。
更具体地说,骨头端部的接合面被一层具有缓冲和保护作用的透明软骨覆盖。这些透明软骨的层很滑,使骨头端部可以沿彼此滑动,几乎没有摩擦力。
在这些透明软骨层之间,滑液作为润滑剂,有利于接合面的滑动。滑液也会稍微分散关节中的作用力,并充当两个表面之间的液封,就像在两块玻璃中间抹油那样,可以将它们粘在一起。滑液由连接着两块骨头的滑膜(也称关节囊滑膜)分泌。滑膜的存在限定了关节间隙的边界:滑膜以外的一切都不属于关节间隙。
滑膜被形成关节囊的结缔组织层包裹着,以限制由透明软骨和滑液的移动所产生的活动可能性。在关节囊的外部就是纤维,这些纤维增厚,并排列成带状的多缕纤维,即副韧带。这些韧带引导作用力穿过关节,并让动作保持在轨道上。
所有这些成分的表层都是穿越整个关节的肌肉。
平衡的关节间隙
在健康的、正常工作的关节中,两块骨头之间的空间是平衡的,并在该关节的整个活动范围(ROM)中保持这种平衡。平衡与对称性并不相同,在整个运动范围内保持平衡的关节间隙并不意味着关节间隙[1]在每一刻都是均匀分布的。
平衡的关节间隙其实是一组复杂因素的产品,其中包括但不限于骨关的接合面的轮廓、滑液的粘度、关节囊和关节周围的韧带的弹性,以及关节周围的肌肉的各类收缩。在更大的意义上,组织的水合作用、循环系统的效率、神经系统感觉关节运动的能力,以及注意力的集中都有助于这种平衡。
在每块骨头的端部的透明软骨层能够吸收巨大的作用力,并且将作用力分散到骨小梁中,那是骨头的负重支架。然后,作用力一次又一次地穿过骨头和关节,如此行进,直至遇到一个可吸收作用力的表面(如,大地),或者,通过一些运动(如扔球)将它排出到空间中。作用力还可以被接收并将传递到其他结构,或通过软组织以无益的方式传播。
当关节间隙没有在整个运动范围内达到平衡,并且作用力没有分布在整个接合面上,在透明软骨上就会出现一些磨损。就像体内的其他组织那样,透明软骨不断重塑本身,并且能够修复轻微磨损,不会有长期的影响。(体内还有肌肉等其他组织比透明软骨的重塑速度更快。)如果在较长一段时间内,关节间隙中一直持续地存在不平衡,那么透明软骨不能自我修复,最终可能会彻底损坏或磨蚀。如果透明软骨被磨蚀,骨头的末端会互相摩擦。这种摩擦最终会刺激骨头不均匀地生长,从而导致在骨头上有更多的摩擦和压力。摩擦和生长的这个周期可能变得相当痛苦,并且是骨关节炎的原因之一。
在关节间隙中缺乏平衡的原因有很多种。有时候,人们只是生下来就没有整齐的关节。更多的时候,挑战源于最终导致关节囊及韧带失衡的低效运动模式、关节周围的肌肉过劳或使用不足,或者是神经系统的习惯模式。这些习惯往往是长期存在的,一直很熟悉,但没有意识到其存在。如果执行的时间过长,或排除任何其他想法,即使是完全恰当的想法、锻炼或概念也可能导致危险。我们对运动的想法感到困惑不亚于我们与生俱来的骨骼和韧带。例如,将两肩向后拉,打开前胸,这是一种常见的指引。对于肩膀不自觉地向前,置于其肋骨附近的人来说,这是一个有用的指引。然而,如果脊柱有问题,肩部向后拉有可能会增加颈部和上背部的工作,并且无法解决潜在的脊柱问题。另外,这可能偶尔是一种有效的指引,但是,如果有人将肩部继续向后拉的时间过长,那么最终会被拉得太后,导致在另一个方向失去平衡。
关节动作
认为我们人体可以像人类所建立的结构那样工作,这是一个根本性的谬误。人体关节经常被拿来与在施工中用于创建接头的设备进行比较,如铰链或球窝关节。但是,人体关节与那些木材、金属、陶瓷或塑料件之间的接头相比,机理并不一样,部分原因是这些材料的性质。[2]
比较肘关节和铰链的运作,在表面上看可能是有用的,但是这种对比会限制我们对于在关节处如何发生运动的思考。人体内没有什么是完全平坦的或笔直的,也没有小于三维的,包括骨头的关节面。因为这些关节面总是具有体积和轮廓,在关节中的运动始终是三维的。
用于描述在关节处的运动的常规术语“关节动作”,描述的是相当简单的运动,它们是平的、二维的,并且在单一平面中发生。没有一个关节动作考虑到了在每一个关节的运动可能性的体积。
使用二维语言来形容我们的关节动作,其影响是,我们简化了对可能完成的动作的概念,并且简化了我们可以做的动作。所带来的危险是,我们剥夺了自己的运动选择,并且过度使用我们认为可用的一些选择。
因为在我们的关节中的所有接合面都是三维的,每个关节都能够完成不止一个关节动作,甚至是三四个动作。不可能在每个动作中都有等量的移动,但即使是很小的移动,关节也会在每一个维度上都有移动。这个微小的动作可能对两三个关节有巨大的影响,也许这种影响的后果需要5到10年才会体现出来。
关节动作的传统定义
描述关节动作的基本术语适用于体内的大多数关节。有几个术语对于特定关节具有特别的含义,有一些术语在多个关节中都会用到,但在不同的关节中有不同的含义。
关节动作的解剖定义经常使用平面来描述移动。平面是指二维表面,并且三个基本平面彼此相交成直角。当平面被定向为在身体的中心相交时,它们可以被用来描述身体内的关系(前和后描述身体部位的矢状关系)或运动(屈曲和伸展描述脊柱的矢状运动)。垂直平面(也称为冠状面或门平面)将身体分为前部和后部。水平面(也称为横断面或表面)将身体分为上部和下部。矢状面(也称为正中面或轮面)将身体分为左右两侧。
脊柱关节动作
下列术语描述在脊柱的关节运动时的运动,以及彼此接合的椎骨。在这些脊柱动作中,脊柱的实际形状会变化,这与让脊柱在空间中移动是不同的动作(例如,在髋部接合,这是在腿部发生的动作)。常见的瑜伽语言(如,前弯)是一种非解剖学描述,指脊柱在空间中的移动或者脊柱关节的屈曲动作(参见第33页,第2章)。
屈曲——矢状面中的移动,让身体的前表面彼此靠近。
伸展——矢状面中的移动,让身体的前表面彼此远离。
侧屈——在垂直面或冠状面中的移动,让脊柱向其中一侧弯曲。
旋转——在水平面或横断面中的移动,围绕脊柱的垂直轴:
在滚动时,脊柱的所有部分都向相同的方向旋转。
在扭转时,脊柱的其中一部分与脊柱的另一部分的方向不同。
轴向伸展——沿着脊柱的垂直轴的移动,通过减小矢状弯曲来拉长脊柱。
绕环——在空间中围绕身体的轴线行进的移动,勾画出一个圆锥形状。这与旋转并不相同。
四肢关节动作
以下术语描述可以在上肢和下肢(其中包括肩胛带和骨盆)中发生的关节动作。像脊柱那样,在空间中移动关节与在关节部位的实际接合是有区别的,后者是关节动作。(例如,当举起手臂指向天花板时,肘部的确在空间中移动了,但肘部关节并不一定有动作。)
在所有肢体中的动作
对于下面的关节动作,可以使用相同的术语来描述在各种关节中的运动。具体有哪些骨头参与运动将取决于接合的关节。
屈曲——肢体的前表面朝向彼此移动;根据脊柱、髋部和肩部的不同位置,这种动作可能在任何平面中发生。因为在我们还是胚胎时四肢所发生的螺旋,在膝、踝和足关节中的屈曲使我们公认的腿的后表面彼此靠近。
伸展——前表面远离彼此的运动;同样,取决于脊柱、髋部和肩部的不同位置,这种动作可能在任何平面中发生。因为胚胎螺旋,在膝、踝和足关节的伸展让我们公认的腿的后表面彼此远离。
旋转——围绕肢体轴线的运动;在髋部、肩部和前肢,这被进一步描述为内向(或中间)和外向(或侧向)旋转。在手、足和前臂的旋转有特殊的名称(请参见下文)。
外展——肢体远离躯干或身体中线的运动;对于手、脚和肩胛骨,该术语描述一个更具体的动作(请参见下文)。
内收——肢体朝向躯干或身体中线的运动;对于手、脚和肩胛骨,该术语描述一个更具体的动作(请参见下文)。
绕环——在空间中围绕肢体轴线行进的移动,勾画出一个圆锥形状。这与旋转并不相同。
具体肢体的动作
四肢的某些部分可以执行上述一般术语未予描述的动作。这些关节动作有用于特定身体部位的术语(比如,旋前和旋后,仅发生在脚和前臂,而桡侧弯曲则仅发生在手腕)。在某些身体部位中的某种一般关节动作对于肢体的其余部分而言,可能指的是不同的动作。(对于手来说,外展是指离开中指的移动,而不是离开身体中线的移动)。
手
旋转——围绕手的长轴旋转,当提起手的外边缘时被称为“外翻”,当提起手的内边缘是被称为“内翻”。
外展——其他手指远离第三只手指的移动。
内收——其他手指向着第三只手指的移动。
桡侧弯曲——手指朝向手的桡侧(拇指)的移动。
尺侧弯曲——手指朝向手的尺侧(小指)的移动。
相对——拇指和小指向彼此移动。
手腕
背屈——运动时手背(后表面)和前臂之间的角度减小。(从胚胎学的角度来看,这是腕关节的伸展。)
掌屈——运动时手掌(掌表面)和前臂之间的角度减小。(从胚胎学的角度来看,这是腕关节的屈曲。)
桡侧弯曲或外展——手朝向前臂的桡侧(拇指侧)移动。
尺侧弯曲或内收——手朝向前臂的尺侧(小指侧)移动。
前臂
旋转——桡骨和尺骨的旋转如果使得它们彼此交叉,则被称为旋前,如果使它们不交叉,则称为旋后。(有时旋前被描述为“掌心向下”,而旋后为“掌心向上”,但掌心的位置并不能准确描述这些动作,因为肩关节和肩胛骨也会有这些动作。)锁骨挺起——锁骨的远端在垂直平面中向上移动。
压低——锁骨的远端在垂直平面中向下移动。
向上旋转——锁骨绕其纵轴的旋转,将上表面向后转动。
向下旋转——锁骨绕其纵轴的旋转,将上表面向前转动。
前突——锁骨的远端向前移动,通常伴有肩胛骨前突。
回缩——锁骨的远端向后运动,通常伴有肩胛骨回缩。
肩(盂肱关节)
屈曲——手臂在空间中矢状向前移动。
伸展——手臂在空间中矢状向后移动。
外展——手臂从躯干向侧面打开,并远离身体。
内收——手臂从外展的姿势朝向身体的侧面移动。
水平外展——手臂从在身前的弯曲姿势向侧面打开,并远离身体。
水平内收——手臂从外展的姿势向身体的侧面移动,在身体的前方成弯曲姿势。
前突——在矢状面中让肱骨头滑向前的动作。
回缩——在矢状面中让肱骨头滑向后的动作。
肩胛骨
挺起——在垂直面让肩胛骨滑向上的动作。
压低——在垂直面让肩胛骨滑向下的动作。
向上旋转或旋外——肩胛骨在垂直平面中旋转,使关节窝朝上,并且肩胛骨下角横向移到一边。
向下旋转或旋内——肩胛骨在垂直平面中旋转,使关节窝朝下,并且肩胛骨下角向内移向脊柱。
外展或前突——在水平面内远离脊柱的移动,最终朝着身体的前部包裹肩胛骨。
内收或回缩——在水平面内朝向脊柱的移动,最终在后面将两侧肩胛骨拉向彼此。
脚
旋转——围绕脚的长轴的旋转,当提起脚的外边缘时被称为外翻,当它提起脚的内边缘时被称为内翻。
外展——前脚掌向着脚的外侧边缘(小趾侧)移动,并且脚跟不动;脚趾朝远离第二趾的方向移动。
内收——前脚掌向着脚的内侧边缘(大脚趾侧)移动,并且脚跟不动;脚趾朝向第二趾移动。
旋前和旋后——对于双脚来说,旋前有时被认为等同于外翻,有时是外翻和外展的组合。对于双脚来说,旋后有时可以与内翻互换使用,有时是内翻和外收的组合。
踝
跖屈——使脚掌(脚底平面)和前腿背面之间的角度减小的移动;脚尖下垂。(从胚胎学的角度来看,这是踝关节屈曲。)
背屈——使脚的上面(背面)和前腿之间的角度减小的移动。(从胚胎学的角度来看,这是踝关节伸展。)
骨盆
下垂——骶骨独立于骨盆的移动,骶骨的顶部向前倾斜,也称点头,而骶骨的底部(靠近尾骨)向后倾斜。这是在骶骨和骨盆或胯骨之间的骶髂(SI)关节的移动,而不是整个骨盆的移动(后者将是在髋关节或腰椎的关节动作所引起的骨盆向前或向后倾斜)。
反垂头——骶骨的移动,骶骨的顶部向后倾斜,而骶骨的底部(靠近尾骨)向前倾斜。这是在骶骨和胯骨之间的骶髂关节的移动,而不是整个骨盆的移动(后者将是在髋关节或腰椎的关节动作所引起的骨盆向前或向后倾斜)。
关节的活动范围
身体永远不会发生只有一个关节在活动的情况,也不会只执行一个关节动作。在任何给定的运动中,身体都可能要通过15个甚至500个不同的关节动作的微妙作用来移动,哪怕只是弯曲一条腿或举起手臂。
即使我们只打算完全集中于某个特定的关节,但只要我们开始运动,它就会传递到在骨头另一端的关节,并进入下一组骨头和关节,然后是下一组骨头和关节,再下一组——最终进入脊柱,并一路传递到外围。如果你被动地躺着,有人来移动你,那么这种移动仍然会通过你的组织以某种方式传递下去。
因为运动在身体中的这种传递方式,所以如果只把重点放在一个关节的活动范围,那是不切合实际的。虽然熟练的动手实践者有可能有效地隔离出一个关节,并确定在骨骼和软组织中有多少运动,但只要我们开始自主地运动,就必须考虑到在体内的其余运动选择。
观察一个人运动的整体性时,可以看到当运动似乎停在一个关节时,它会转移到下一个关节。有时它会跳过不容易移动的关节,或者动作变小,因此很难察觉,但它总是会到某处去。
我们不应集中于特定关节的活动范围,而应该观察骨骼系统中的整体运动模式:观察在哪些地方的运动较多,并且比较容易,观察在哪些地方的运动较少,并且似乎更有挑战性。然后询问如何保持平衡:如果有人做到了某个关节的极限,这种运动是否可能在下个关节中完成?是否有些关节在所有运动中都过度移动?是否有些关节完全无法活动,仿佛没有关节那样?它也可能是注意力的问题:无论一个人是柔韧性非常好还是非常僵硬,其身体中都会有些地方是自己很了解的,而有些地方还存在更多的未知因素。
结束语
是否成功完成某个瑜伽体式(或任何运动),应该通过全身的平衡或内在平衡的质量来进行衡量,而不是只考量单一关节的活动范围。骨骼系统中的这种质量源于每个关节中有平衡的关节间隙、在骨骼和关节中有明确的运动传递途径,以及就我们的整体身体系统而言,对我们个人模式的认识。
[1].我通过身心平衡技法(BMC,Body-Mind Centering)第一次学习到“平衡关节间隙”的概念。BMC方法的基础是,改变在骨骼系统和韧带系统中的运动模式。
[2].如果有兴趣阅读更多有关这些差异的资料,可以看看史蒂芬·沃格尔(Steven Vogel)所著的一本令人着迷的书《猫爪和弹弓:自然与人的机械世界(Cats' Paws and Catapults:Mechanical Worlds of Nature and People)》(W.W.Norton & Company,1998)。